Тема 3.2. Управление
Урок по предмету "Информатика" для 9 класса по теме "Примеры роботизированных систем (система управления движением в транспортной системе, сварочная линия автозавода, автоматизированное управление отопления дома, автономная система управления транспортным средством и т. п.). Практическая работа «Знакомство с учебной средой разработки программ управления движущимися роботами»". Комбинированный урок. На уроке предусмотрено использование следующих типов электронных образовательных материалов: "Инструкция по выполнению практической работы", "Интерактивный справочник терминов и понятий", "Обучающие видеоролики", "Самостоятельная работа".
Тип урока: Комбинированный урок
Ключевые слова: РОБОТИЗИРОВАННЫЕ СИСТЕМЫ, СОБЫТИЕ, СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ТРАНСПОРТНОЙ СИСТЕМЕ, СВАРОЧНАЯ ЛИНИЯ АВТОЗАВОДА, АВТОНОМНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, РОБОТ, УМНЫЙ ДОМ, АНДРОИД, БЕСПИЛОТНЫЕ АВТОМОБИЛИ, ИССЛЕДОВАНИЕ, ЭЛЕМЕНТ, УСТРОЙСТВО, ПРОЦЕСС, ДОРОЖНОЕ ДВИЖЕНИЕ
Базовые понятия, единые для школьного образования: ДАННЫЕ, АЛГОРИТМ, ДВИЖЕНИЕ, ЖИЗНЬ, ИЗМЕРЕНИЕ, ИНФОРМАЦИЯ, КОД, БЕЗОПАСНОСТЬ, МОДЕЛИРОВАНИЕ, НАБЛЮДЕНИЕ, ОБЪЕКТ, ПЕРЕМЕННАЯ, СИСТЕМА, ЦЕЛЬ, ЭКОНОМИКА, МОДЕЛЬ, ВЕЛИЧИНА
- Вхождение в тему урока и создание условий для осознанного восприятия нового материала
- Обучающий видеоролик "Умный город на ВДНХ"
- Интерактивный справочник "Управление. Сигнал. Обратная связь"
- Освоение нового материала
- Обучающий видеоролик "Примеры роботизированных систем"
- Применение изученного материала:
- Практическая работа "Знакомство с учебной средой разработки программ управления движущимися роботами"
- Проверка приобретённых знаний, умений и навыков:
- Самостоятельная работа "Разработка программы для робота"
- Дополнительные материалы:
- Обучающий видеоролик "Наш космос будущего"
Вхождение в тему урока и создание условий
для осознанного восприятия нового материала:
Мотивирование на учебную деятельность
Видеоролик
"Умный город на ВДНХ"
Актуализация опорных знаний
Интерактивный справочник "Управление. Сигнал. Обратная связь"
Алгоритмы управления
Прочитай определения темы «Управление. Сигнал. Обратная связь».
Освоение нового материала:
Осуществление учебных действий по освоению нового материала
Видеоролик
"Примеры роботизированных систем"
Применение изученного материала:
Выполнение межпредметных заданий и заданий из реальной жизни
Практическая работа
"Знакомство с учебной средой разработки программ управления движущимися роботами"
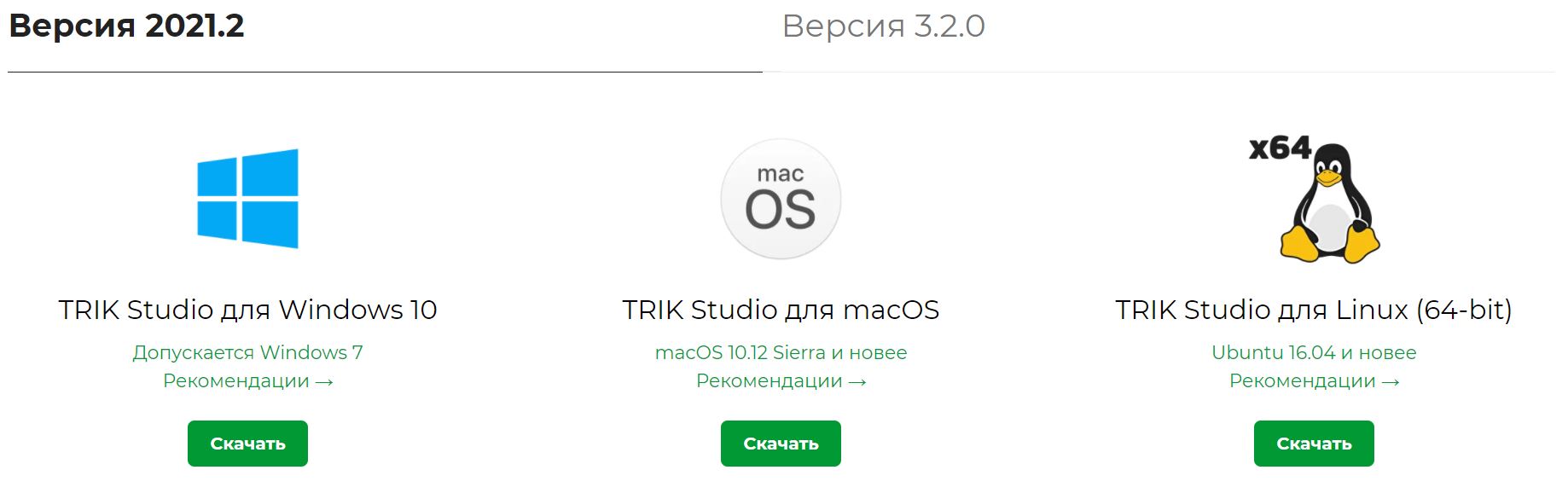
Для выполнения практической работы нужно загрузить среду для разработки программ управления движущимися роботами.
TRIK Studio - бесплатная среда программирования роботов

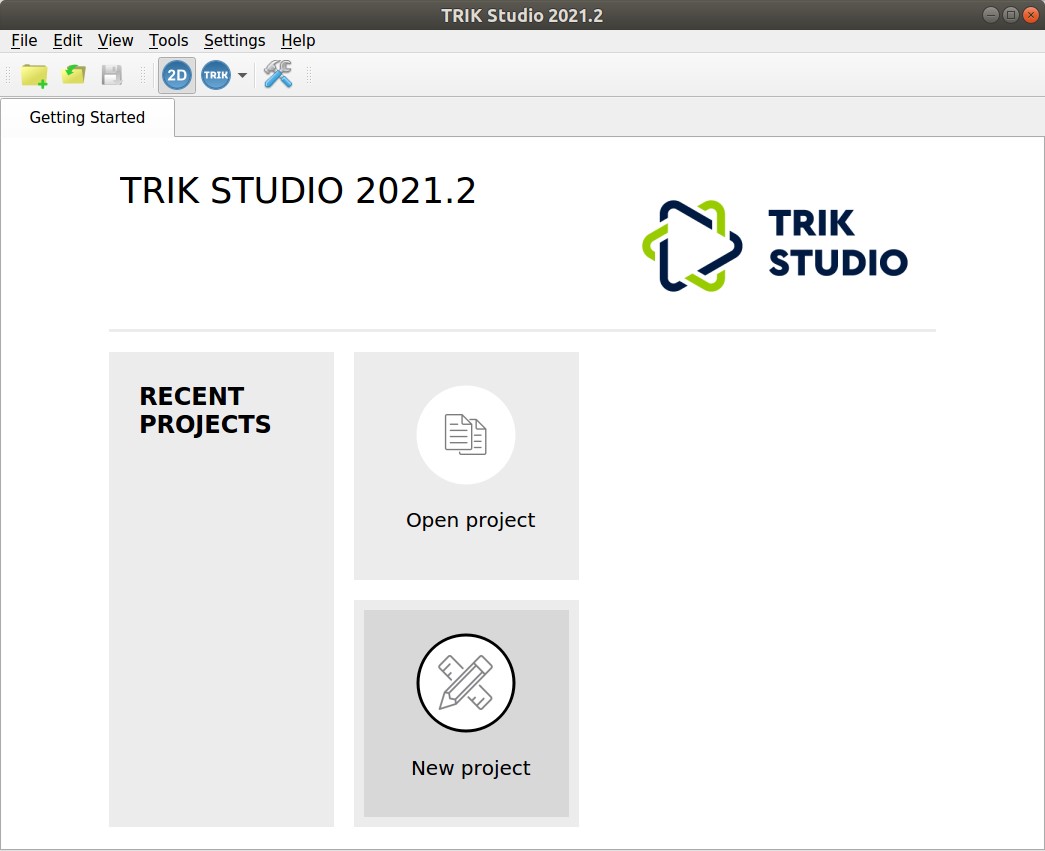
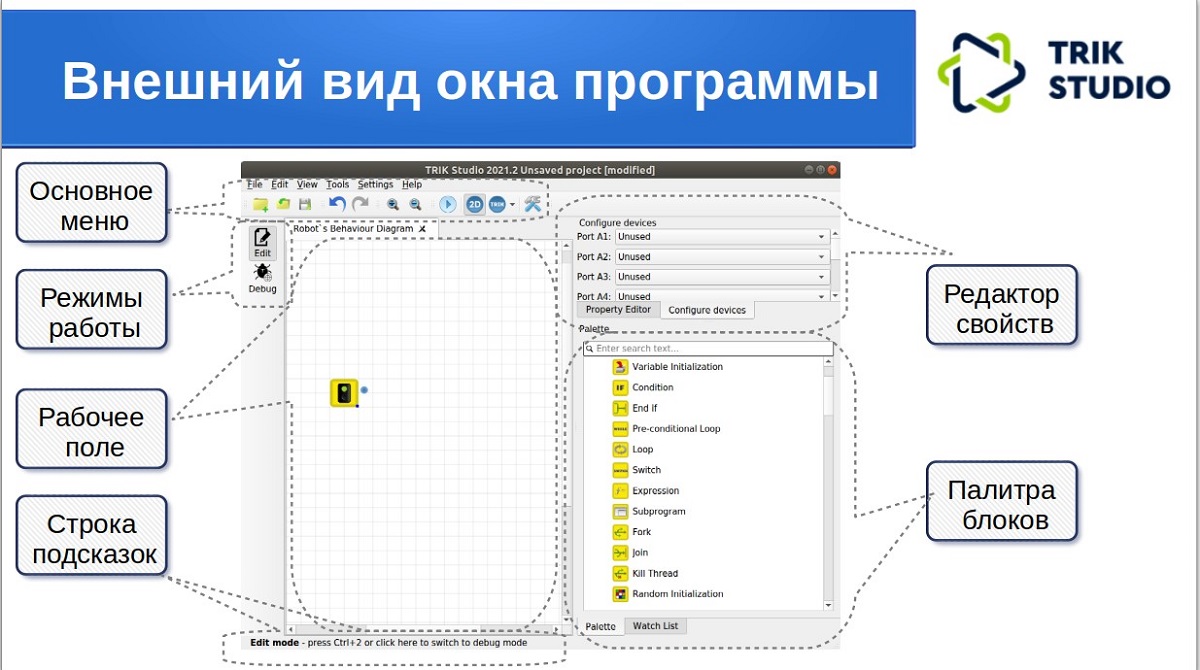
Знакомство с основными полями окна новой программы
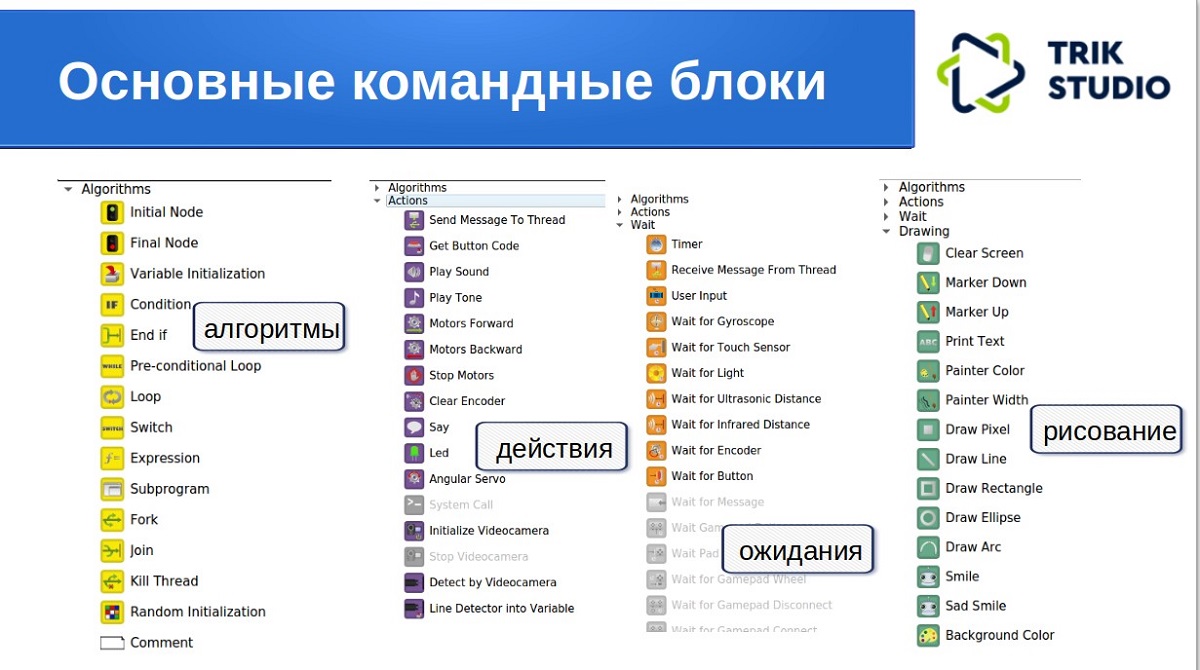
Исследование основных блоков для создания программы
Осуществление сборки программы

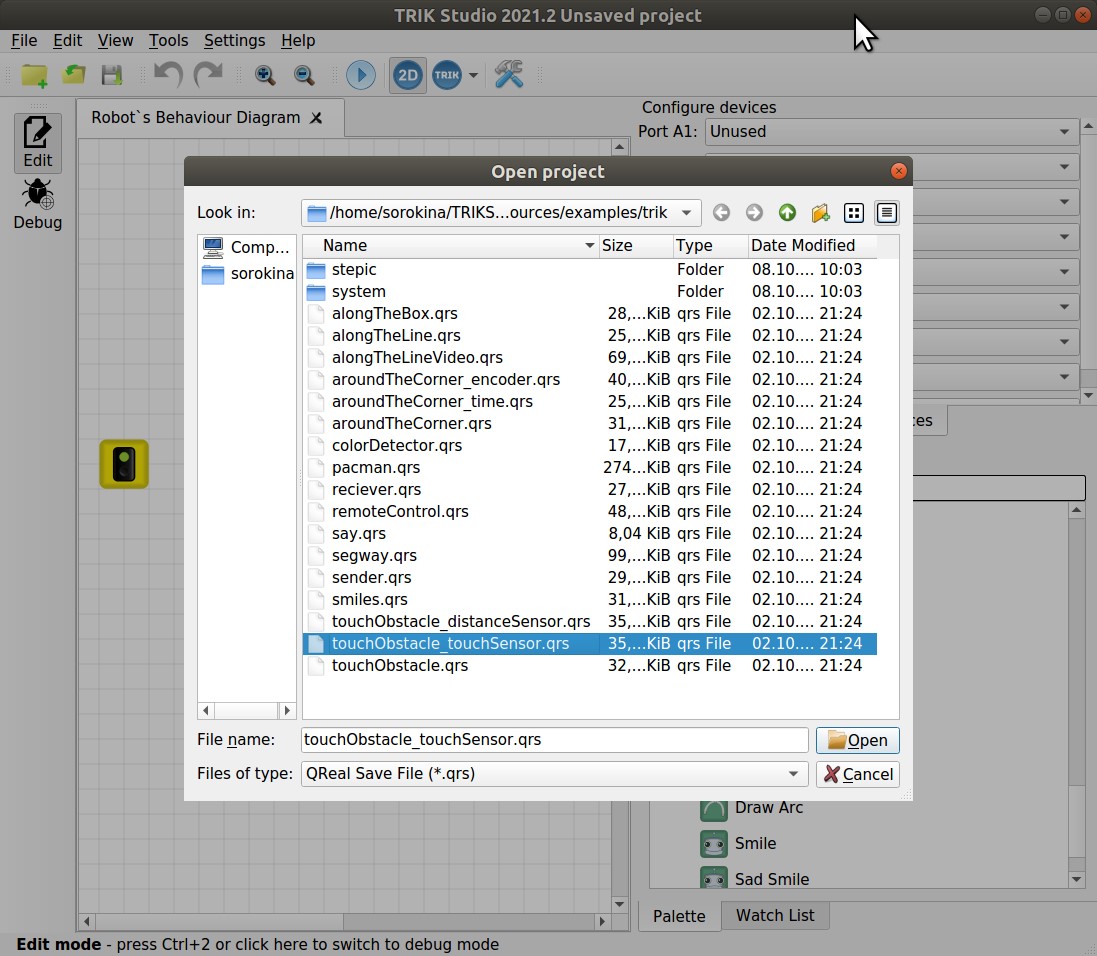
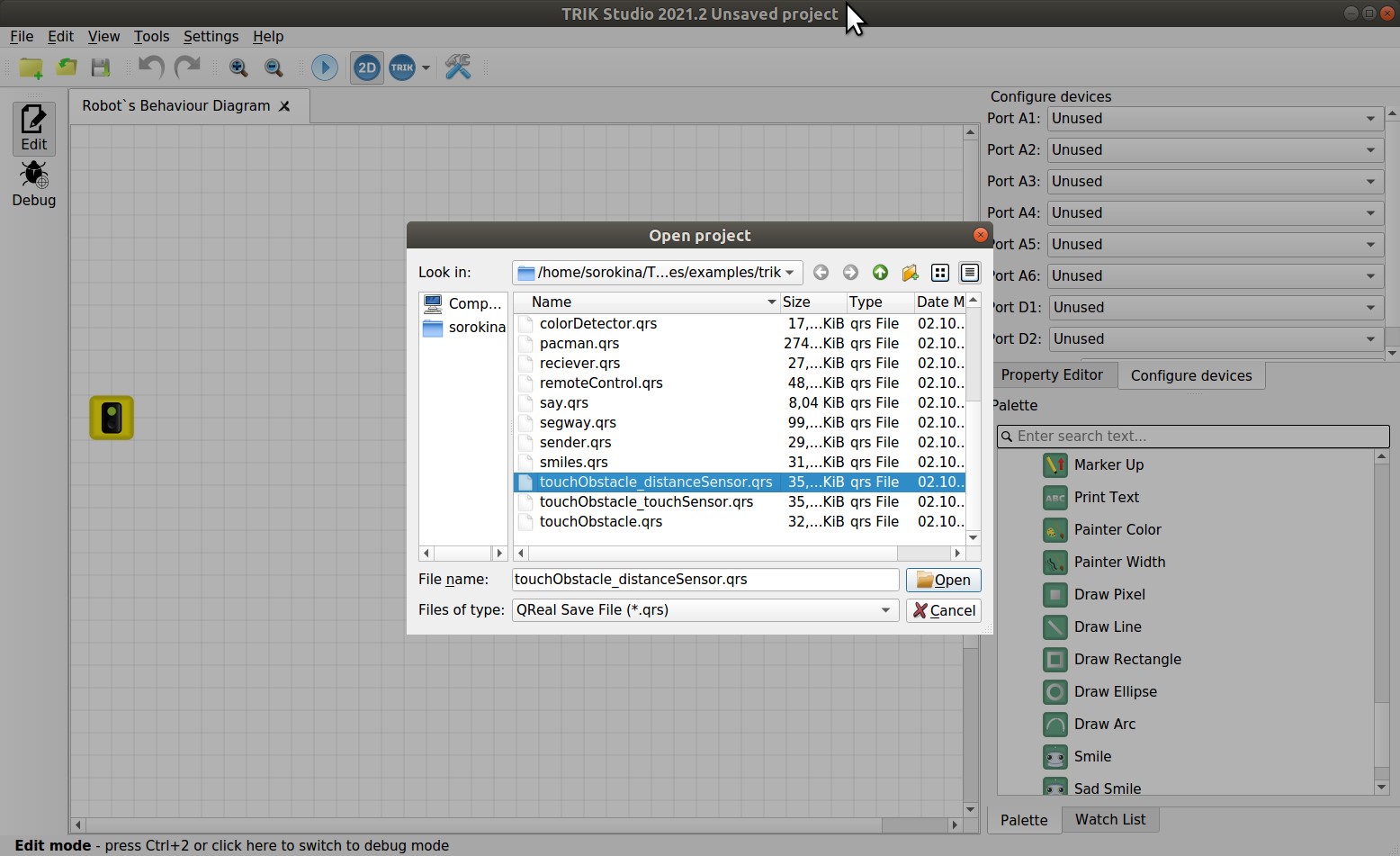
Открываем файл программы с датчиком касания
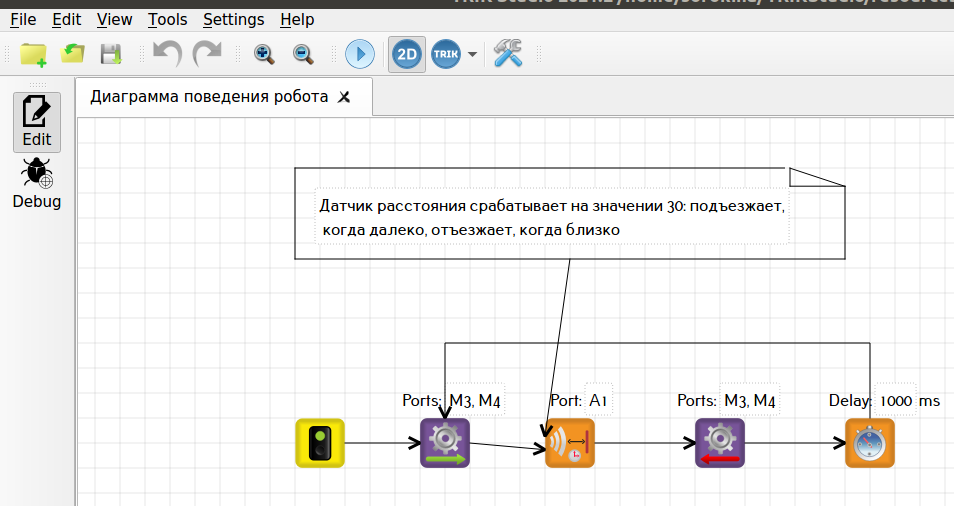
Исследование программы с датчиком касания

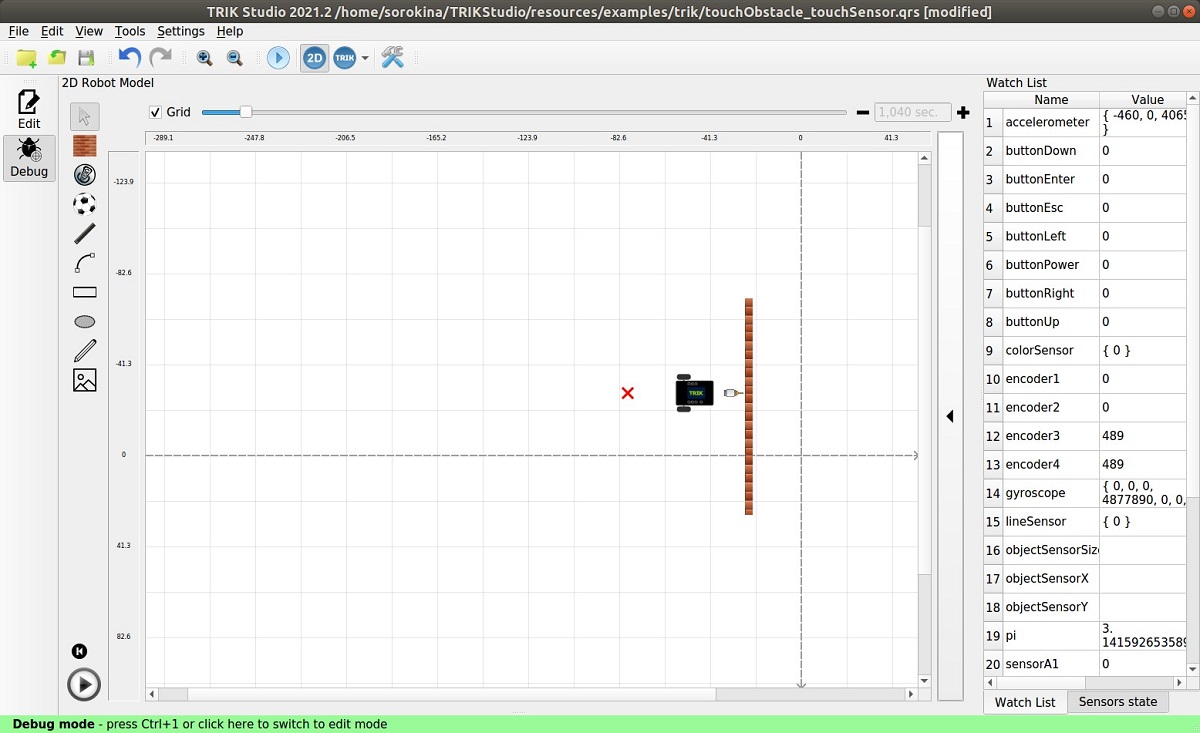
Тестирование программы с датчиком касания
Открываем программу с датчиком касания

Проверка приобретённых знаний, умений и навыков
Диагностика, самодиагностика
Самостоятельная работа "Разработка программы для робота"

Дополнительные материалы:
Конвергентный обучающий видеоролик:
Посмотри образовательный фильм, созданный с помощью технологии виртуальной реальности — интерактивное учебное пособие, которое позволяет почувствовать себя непосредственным участником событий и объединяет в себе знания по разным предметам.
Видеоролик
"Наш космос будущего"

Перейти на сайт школы
©